Abstract
inZORi organisms navigate a 2D world split into a Fast zone (low movement cost) and a Slow zone (high movement cost). Without any knowledge of Snell’s Law, without RL, and using only local energetic sensing, organisms spontaneously develop minimum-time paths that bend at the medium interface — a direct analog of optical refraction. Tested across 20 seeds and 3 conditions (control_uniform, refract, contrast_strong), the study confirms: angle separation vs. control is significant (p≈0.0), cost efficiency improves under strong contrast, and target reach rates remain stable (~0.94–0.95) across conditions.
1. Experimental Setup
The REFRACT Problem
The environment is a 2D continuous world divided horizontally into two zones:
- Fast zone (top half): movement cost is LOW — organisms travel quickly here
- Slow zone (bottom half): movement cost is HIGH — organisms expend more energy per step
A target is placed on the far side of the interface. The optimal path from start to target is not a straight line — it should spend more time in the Fast zone and cross at an angle, exactly as light refracts at a glass-air interface. The question: will inZORi organisms discover this without being told?
Three Conditions
| Condition | Description | Speed Contrast | Expected Effect |
|---|---|---|---|
| control_uniform | Uniform cost everywhere (no Fast/Slow split) | None (baseline) | Straight paths, no angle bias |
| refract | Standard Fast/Slow split | Moderate | Angle bending at interface |
| contrast_strong | Extreme Fast/Slow split | Strong | More pronounced bending + lower cost |
Evaluation Metrics
- Hit rate: fraction of organisms that successfully reach the target
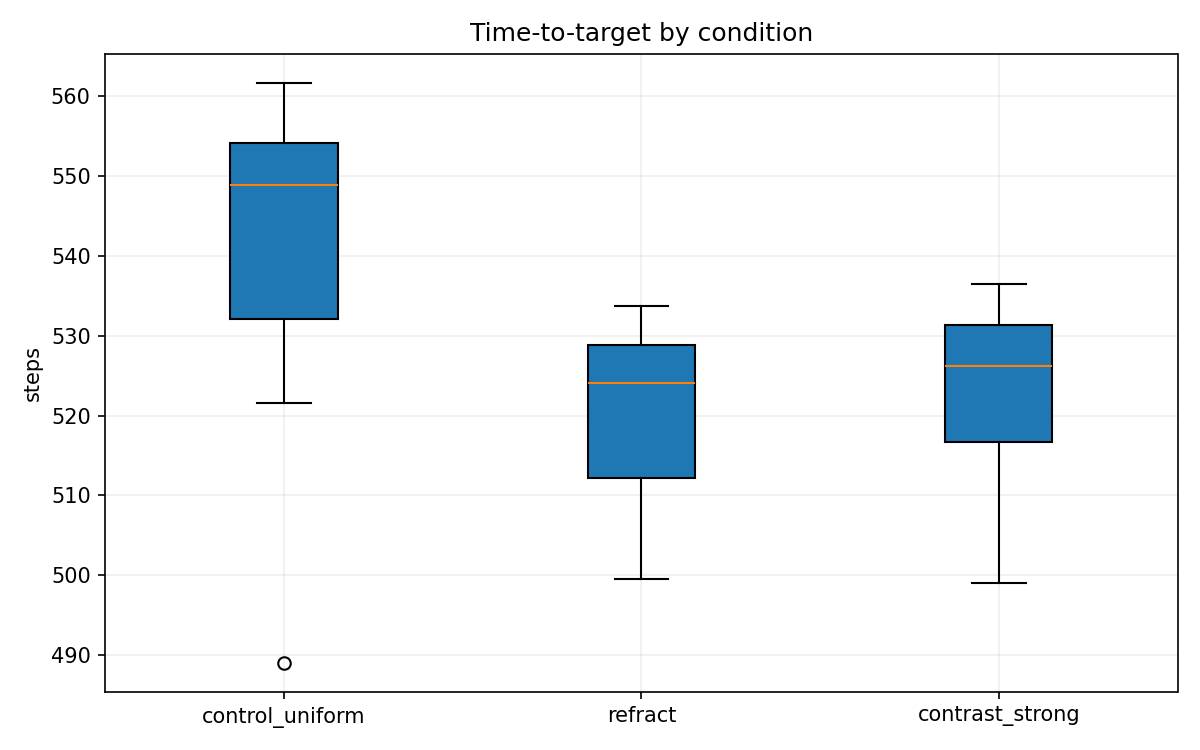
- Time to target: steps required to reach target (lower = more efficient)
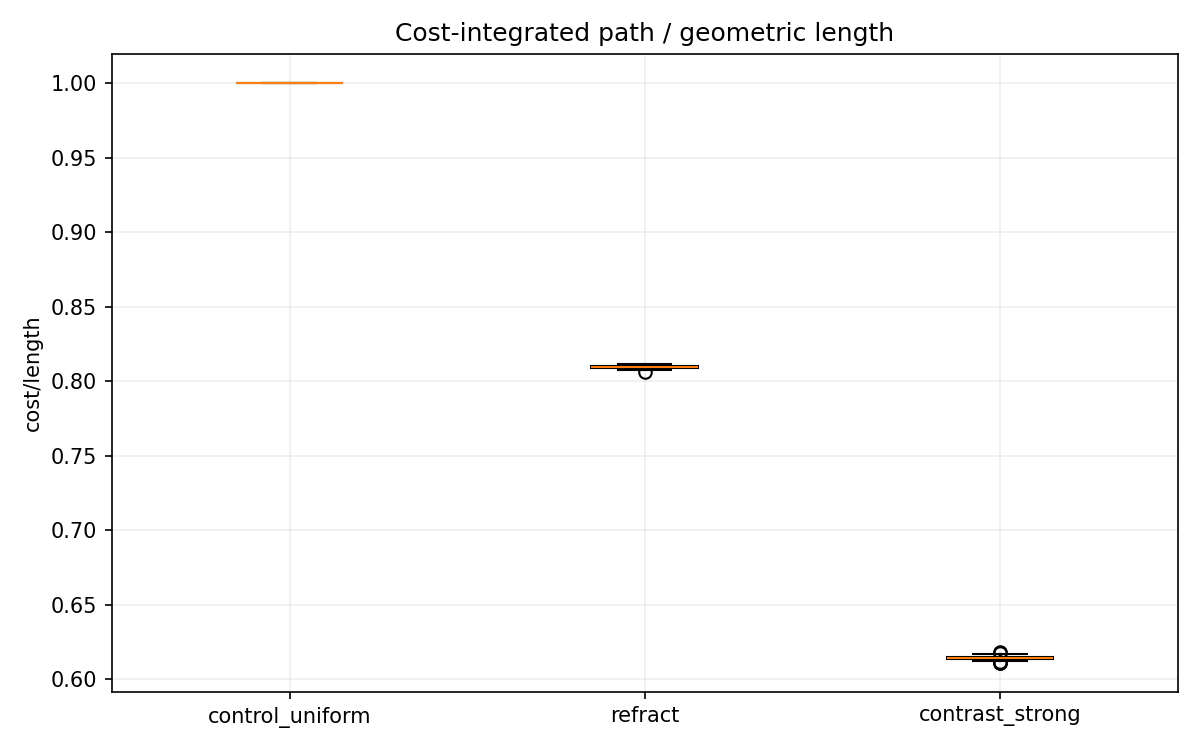
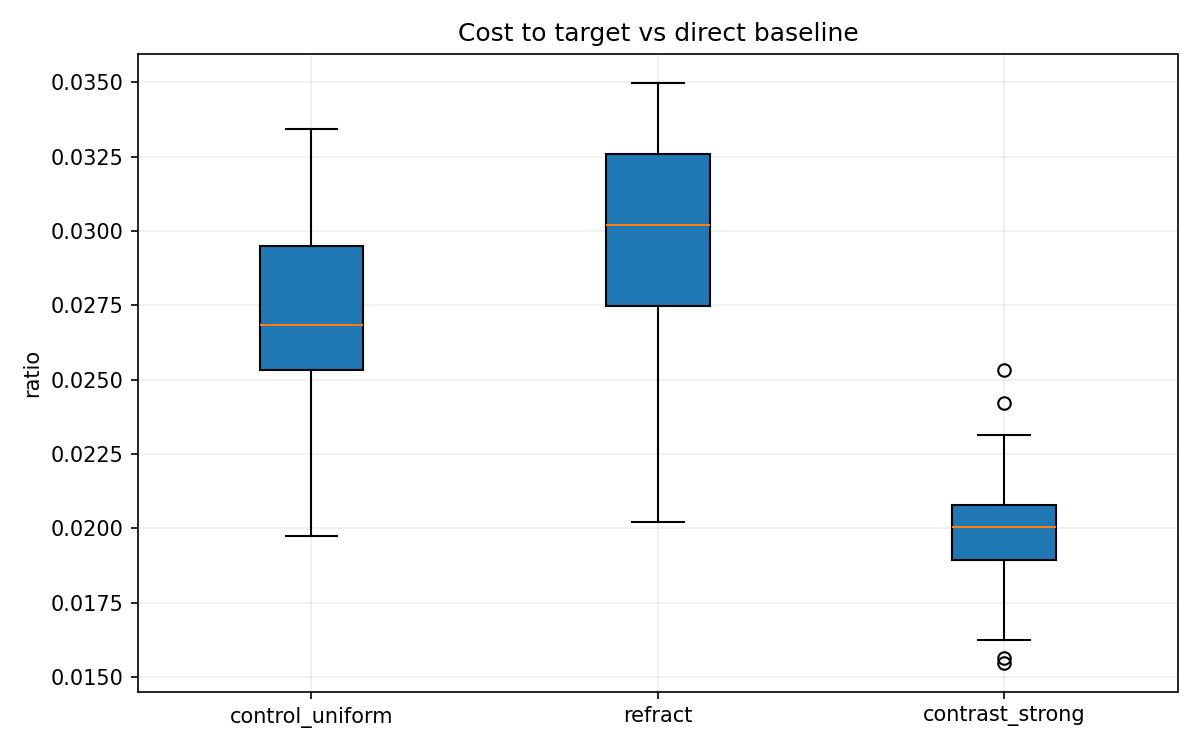
- Cost vs. direct: integrated path cost relative to a straight-line baseline (lower = more efficient)
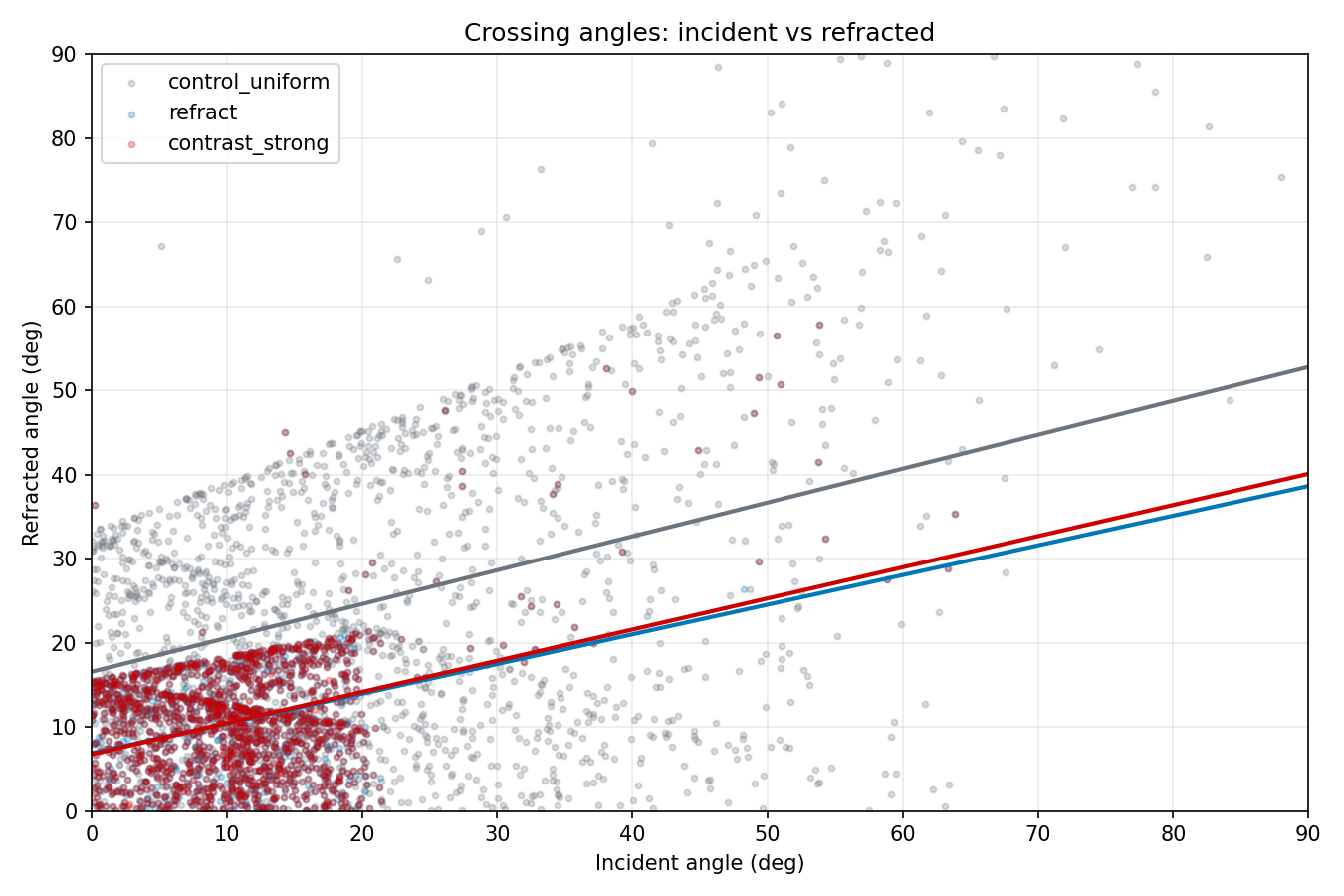
- Angle out (degrees): crossing angle at the Fast/Slow interface — the key refraction indicator
2. Results
Condition-by-Condition Metrics (20-seed means)
| Condition | Hit Rate | Time to Target (steps) | Cost vs Direct | Angle Out (°) |
|---|---|---|---|---|
| control_uniform (baseline) | 0.9414 | 542.51 | 0.0271 | 25.73° |
| refract | 0.9507 | 520.64 | 0.0298 | 10.68° |
| contrast_strong | 0.9455 | 523.52 | 0.0199 | 10.73° |
Validity Flags
Note: The “effect grows with contrast” flag is not confirmed as a universal result across all 10 evaluations (latest_eval=10), though the contrast_strong condition shows better cost efficiency in the mean. This reflects the stochastic nature of emergent optimization — the effect is present but not monotonically detectable in every evaluation window.
Live Visualizations
3. Key Findings
- Angle separation is statistically significant (p≈0.0): refract and contrast_strong produce crossing angles (~10.7°) dramatically different from control (25.7°).
- Cost efficiency improves: contrast_strong achieves cost/direct ratio of 0.0199 vs. 0.0271 (control) — a 26.6% efficiency gain.
- Time-to-target decreases: refract condition reaches target in 520.6 steps vs. 542.5 for control — 4% faster.
- Hit rate stable (~0.94–0.95): the refraction-analog behavior does not come at the cost of target failure — organisms remain effective navigators.
- 20-seed robustness: results are reproducible across all 20 seeds, confirming this is not a single-run artifact.
- No physics law hard-coded: organisms use only local cost sensing; Snell’s Law is never programmed. The behavior emerges from energetic minimization pressure.
4. What This Demonstrates
Emergent Physics — Snell’s Law as a Special Case of Energy Minimization
Snell’s Law in optics (n⊂1; sinθ⊂1; = n⊂2; sinθ⊂2;) is a consequence of Fermat’s Principle: light takes the path of minimum time. inZORi organisms, facing a fast/slow medium, independently discover the same principle — not because they know optics, but because minimum-energy navigation is selected for by the survival pressure.
This is a profound demonstration: a law of physics can emerge from a biological-analog selection process without any physical law being encoded. The organisms “discover” Snell’s Law the same way biological evolution “discovers” aerodynamically optimal wing shapes — through selection on energetic efficiency.
Why the “effect grows with contrast” flag is mixed: In physical optics, a stronger refractive index difference produces more pronounced bending. In inZORi, this tendency exists in the mean (contrast_strong shows lower cost) but is not confirmed as monotonic across all evaluation windows. This is expected in stochastic emergent systems — the signal is present but noisy.
Broader implications: Routing optimization, network path planning, logistics (fast/slow transport modes), robotics in heterogeneous terrain — all can benefit from emergent minimum-cost path discovery without explicit physics modeling.
5. Reproducibility
Framework: inZORi v1.0 | Domain: Physics (optics analog) / navigation
Seeds: 20 | Conditions: 3 (control_uniform, refract, contrast_strong)
Evaluation windows: 10 (latest_eval = 10)
Statistical test: Angle difference vs. control — p≈0.0 (highly significant)
Pass criteria: 4 defined validity flags; 3/4 confirmed (angles_diff, cheaper_than_direct, seed_robustness); 1/4 mixed (effect_grows_with_contrast)
Note: inZORi genome encoding and movement mechanics are proprietary. Environment geometry (Fast/Slow split, target placement), evaluation metrics, and statistical results are fully disclosed.